Speed is Free / $0 BOM Mindset
I built my first serious mechanical system in my first year of college (2024), before I had formal training in CAD or mechanical engineering.
I was on a student team working on a bionic arm project with very open-ended usability specs. That openness could have diluted the work. Instead, we aligned on a constraint that forced clarity: Cost comes first. Power and modularity are next.
That single decision immediately revealed the real engineering problem.
Early on, we ran into a tradeoff that felt fundamental: if you map “one motor to one joint,” you get one controllable degree of freedom per actuator. A human hand has many joints. The implication was a hand with ~12 motors: expensive, heavy, difficult to package, and fragile in practice. Even if we had the budget, the weight and packaging would have made the project bulky and fragile.
How do you get useful finger motion without buying (and carrying) a motor for every joint?
Because I didn’t have the background at the time to know what “the standard approach” was, my instinct was to go with brute-force exploration: read widely, follow curiosity, and build a mental library of mechanisms.
The key shift came from mechanism design.
A four-bar linkage, usually used in oil pumpjacks, can convert a simple linear input into a constrained, repeatable trajectory. Applied to a finger, this meant:
- Motion could be encoded in geometry, not controlled independently at each joint
- One actuator could drive coupled motion across multiple joints
- The system trades control complexity for mechanical intelligence
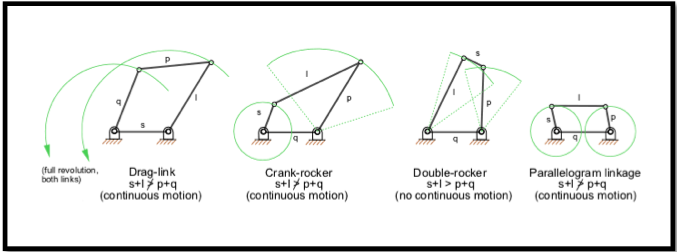
Using linkages instead of assigning one actuator per joint reduced the number of actuators while still achieving coordinated motion across multiple joints. We reduced the actuator requirement from ~12 independent motors to a single actuator driving coordinated finger motion through linkage geometry. The resulting design was simpler, lighter, and cheaper than the one-motor-a-joint approach.